Drei Funktionen in einem Sensor: Messbetriebsarten von Radarsensoren im Überblick
Inhalt dieses Beitrags
Drei Funktionen in einem Sensor: Messbetriebsarten von Radarsensoren im Überblick
Hochentwickelte FMCW-Radarsensoren (frequency-modulated continuous wave bzw. frequenzmodulierte Dauerstrichradare) von Pepperl+Fuchs integrieren in kompaktester Bauform eine beispiellose Funktionsvielfalt. Diese Kombination aus Vielfältigkeit und Robustheit resultiert aus dem verwendeten physikalischen Wirkprinzip. Vom Sensor abgestrahlte elektromagnetische Wellen breiten sich in der Umgebung aus, bis sie auf Objekte treffen. Hierbei entstehen Reflexionen der initial ausgesendeten elektromagnetischen Wellen. Je nach Materie, Form, Größe, Richtung oder Geschwindigkeit des Objekts weist diese sogenannte Radarreflexion unterschiedliche Eigenschaften auf, die der nachgelagerten Auswerteelektronik Rückschlüsse auf die Beschaffenheit des detektierten Objekts erlauben.
Somit sind diese Geräte in der Lage, sowohl die Distanz als auch die Bewegungsrichtung und Geschwindigkeit von Objekten in ihrem Erfassungsbereich hochpräzise zu bestimmen. Hierfür sind in ein und denselben Sensortyp gleich drei verschiedene Messbetriebsarten integriert. Erhalten Sie hier einen Überblick dieser Modi und wie Sie diese effektiv in verschiedenen Anwendungsszenarien einsetzen können.
Messbetriebsart „Erstes Objekt“

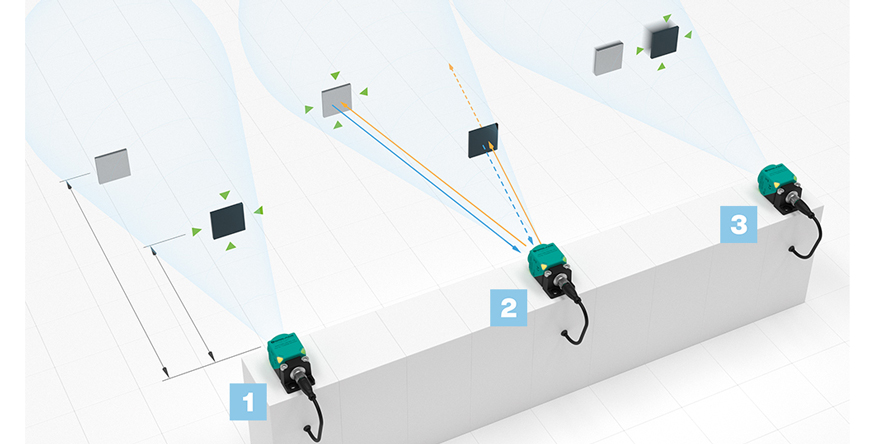
Illustration: Zwei potenzielle Ziele befinden sich im Erfassungsbereich des Radarsensors. Obwohl die Metallplatte deutlich bessere Reflexionseigenschaften aufweist als die Kunststoffplatte, erfasst der Sensor dennoch die Kunststoffplatte als primäres Ziel.
Erklärung: Im Modus „erstes Objekt“ wird materialunabhängig das Objekt erkannt, das sich am nächsten zum Radarsensor befindet. Im Umkehrschluss bedeutet dies, dass – entgegen der vielleicht herrschenden Annahme – ein metallenes, stark reflektierendes Objekt im Erfassungsbereich des Sensors nicht automatisch die Detektion weniger stark reflektierender Objekte stört oder gar ausschließt. Dieser Messbetriebsart zugrunde liegt eine durch den sogenannten „Dopplereffekt“ erklärbare Veränderung der Frequenz der elektromagnetischen Welle bei Auftreffen auf ein Zielobjekt. Das durch das erste Objekt im Erfassungsbereich des Sensors zurückreflektierte Signal (Radarreflexion) weist durch die kürzere Distanz und Laufzeit eine stärkere „Stauchung“ auf als das Signal des weiter entfernten Objekts im Hintergrund. So kann der Sensor diesen Gegenstand als erstes Objekt im Erfassungsbereich erkennen.

Anwendungsbeispiel: Geschwindigkeit ist ein entscheidender Faktor im Material Handling. Dies gilt auch für den Einsatz von Gabelstaplern auf Unternehmensgeländen. Ist hohe Geschwindigkeit in Außenbereichen noch von Vorteil und die Umgebung meist gut einsehbar, so ist in Fabrik- und Lagerhallen aus Sicherheitsgründen jedoch eine gewisse Beschränkung nötig. Um das Personal von dieser Verantwortung zu befreien, kann über einen vertikal ausgerichteten Radarsensor, der als „erstes Objekt“ die Hallendecke bzw. metallene Querverstrebungen unterhalb dieser detektiert, sofort festgestellt werden, wenn der Stapler einen Innenbereich erreicht hat. Ist dies der Fall, wird die mögliche Höchstgeschwindigkeit automatisch auf ein tolerables Maß begrenzt und erst bei Ausfahrt aus der Halle wieder freigegeben. Um eine ungewollte Geschwindigkeitsreduktion unter Traversen oder Brücken im Freifeld zu vermeiden, die ebenfalls als „erstes Objekt“ in Betracht kommen, können eine hohe Filterstärke sowie eine geringe Abtastrate eingestellt werden.
Messbetriebsart „Beste Reflexion”

Illustration: Zwei potenzielle Ziele befinden sich im Erfassungsbereich des Radarsensors. Obwohl sich die Kunststoffplatte näher am Sensor befindet, erfasst der Sensor dennoch die Metallplatte im Hintergrund als primäres Ziel.
Erklärung: Die vom Radarsensor ausgesendeten Mikrowellen verhalten sich aufgrund ihrer kleinen Wellenlänge (2,45 mm bei 122 GHz) ähnlich wie Licht, das heißt, es treten Effekte wie Beugung, Totalreflexion, Wegspiegeln, Interferenz und einige weitere auf. Während die elektromagnetischen Wellen die Kunststoffplatte im hier gezeigten Beispielfall größtenteils durchdringen und nur teilweise reflektiert werden, findet hingegen an der Metallplatte eine vollständige Reflexion statt. Die Amplitudenstärke der an der Metallplatte entstehenden Radarreflexion ist also deutlich höher als die der Reflexion, die sich an der zu großen Teilen durchlässigen Kunststoffplatte bildet.

Anwendungsbeispiel: Der Modus „beste Reflexion“ lässt sich in vielfacher Hinsicht effektiv nutzen. So kann etwa durch die Anbringung sogenannter metallener Winkelreflektoren die Erfassbarkeit ansonsten schwach reflektiver Objekte gravierend gesteigert werden. Eine beispielhafte Anwendung hierfür stellt die präzise Steuerung von Mobilkran-Hubstützen dar. Die Radarkeule eines innerhalb des teleskopierbaren Querträger montierten Radarsensors wird dabei auf einen in der Spitze positionierten Winkelreflektor gerichtet. Bewegt sich das Teleskopelement beim Aus- oder Einfahren vor- oder rückwärts, misst der Sensor diese Distanzveränderung und übergibt die Werte als Basis für weitere Stellvorgänge an die Steuerung des Krans. Auch Schmutzablagerungen und Rückstände von Hydraulikölen, die Messungen erschweren, können in der Messbetriebsart „beste Reflexion“ mit Ausrichtung auf den Winkelreflektor zuverlässig ausgeblendet werden.
Andererseits kann diese Betriebsart auch verwendet werden, um etwa den Füllstand in geschlossenen Behältern zu messen, ohne dass dabei ein Loch in die Außenwandung gebohrt oder geschnitten werden müsste. Grundvoraussetzungen sind hierbei, dass das gemessene Medium eine hohe Reflektivität aufweist und die Materialeigenschaften des Tanks bzw. der Stelle, an welcher der Sensor hindurch misst, eine gute Transmission der Radarwelle zulassen.
Messbetriebsart „Schnellstes Objekt”

Illustration: Zwei potenzielle Ziele bewegen sich mit unterschiedlicher Geschwindigkeit auf den Sensor zu oder von ihm weg. Der Radarsensor erfasst die radiale Geschwindigkeit beider Ziele und erkennt das schnellste Objekt als primäres Ziel.
Erklärung: Durch das von den Pepperl+Fuchs Radarsensoren verwendete Modulationsverfahren FMCW steht über eine Messung der Dopplerverschiebung in jedem Messzyklus ebenfalls die Relativgeschwindigkeit eines erfassten Objekts in Form von Prozessdaten zur Verfügung. Der Begriff „Relativgeschwindigkeit“ bezeichnet hier den Umstand, dass diese Messungen nicht die tatsächliche Realgeschwindigkeit eines Objekts erfassen: Stattdessen wird die Radialgeschwindigkeit, also der Teil der Bewegung gemessen, der in Richtung zum Sensor hin oder von ihm weg wirkt. Tangentiale Geschwindigkeiten oder Geschwindigkeitsanteile erfasst das Verfahren hingegen nicht.

Anwendungsbeispiel: Messbetriebsart „schnellstes Objekt“ eignet sich sehr gut, um einen erweiterten Kollisionsschutz für fahrerlose Transportfahrzeuge (FTF) zu realisieren. Bewegen sich etwa in der Peripherie eines FTF mehrere Objekte auf das Fahrzeug zu, so geht die höchste Kollisionsgefahr nicht notwendigerweise von den Objekten aus, die sich am nächsten zum Fahrzeug befinden, sondern dem sich mit der schnellsten Geschwindigkeit auf das FTF zubewegenden Objekt. In der Messbetriebsart „schnellstes Objekt“ erfasst der Radarsensor Geschwindigkeit und Abstand ebendieses Objekts, worüber errechnet werden kann, wann es theoretisch zu einer Kollision kommt und ob geschwindigkeitsabhängig eine Langsamfahrt initiiert wird.
Des Weiteren bietet diese Messbetriebsart die Möglichkeit, verlässliche Geschwindigkeitsmessungen vorzunehmen, selbst wenn sich stark reflektierende und somit potenziell störende statische Objekte im Erfassungsbereich befinden. Diese können im Modus „schnellstes Objekt“ während des Messvorgangs einfach ausgeblendet werden.
Radarsensoren – den Elementen trotzen
Im folgenden Video erhalten Sie noch einmal eine kompakte Zusammenfassung der drei verschiedenen Messbetriebsarten.
Weitere Informationen
Abonnieren Sie unseren Newsletter und erhalten Sie regelmäßig Neuigkeiten und Wissenswertes aus der Welt der Automatisierung.