Três funções em um único sensor: visão geral dos modos de medição do sensor de radar
Conteúdo deste artigo
Três funções em um único sensor: visão geral dos modos de medição do sensor de radar
Os avançados sensores radar FMCW (onda contínua modulada em frequência) da Pepperl+Fuchs integram uma gama inédita de funções em um design extremamente compacto. Esses sensores são baseados em um princípio físico de detecção que oferece tanto diversidade quanto robustez. As ondas eletromagnéticas emitidas pelo sensor se propagam pelo ambiente até encontrarem um objeto, o que faz com que as ondas inicialmente emitidas sejam refletidas. Dependendo do material, formato, tamanho, direção ou velocidade do objeto, essas reflexões radar apresentam propriedades distintas, permitindo que a eletrônica de avaliação a jusante tire conclusões sobre a natureza do objeto detectado.
Por isso, esses dispositivos são capazes de determinar com alta precisão a distância, direção do movimento e velocidade dos objetos na área de detecção. Para isso, três modos diferentes de medição estão integrados em um único tipo de sensor. A seguir, uma visão geral desses três modos e como você pode utilizá-los de forma eficaz em diferentes cenários de aplicação.
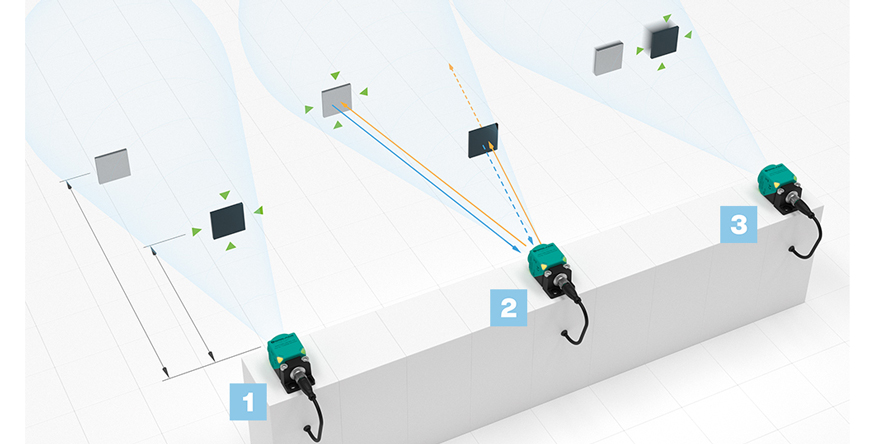
Modo de medição “primeiro objeto”

Ilustração: dois alvos potenciais estão na faixa de detecção do sensor de radar. Embora a placa de metal tenha propriedades de reflexão muito melhores do que a placa de plástico, o sensor ainda detecta a placa de plástico como o alvo principal.
Explicação: no modo “primeiro objeto”, o objeto mais próximo do sensor do radar é detectado independentemente do material. Isso significa que, ao contrário do que se supõe, um objeto metálico altamente refletivo na faixa de detecção do sensor não interfere automaticamente, ou mesmo exclui, a detecção de objetos menos refletivos. Este modo de medição baseia-se na mudança na frequência da onda eletromagnética quando ela atinge um objeto-alvo, o que pode ser explicado pelo efeito Doppler. Devido à menor distância e ao menor tempo decorrido, o sinal refletido de volta pelo primeiro objeto na área de detecção do sensor (reflexão do radar) tem uma “compressão” mais forte do que o sinal do objeto mais distante no fundo. Isso permite que o sensor detecte esse objeto como o primeiro objeto na faixa de detecção.

Exemplo de aplicação: a velocidade é um fator decisivo na movimentação de materiais. Isso também se aplica ao uso de empilhadeiras nas instalações da empresa. Embora altas velocidades ainda sejam uma vantagem em áreas externas, onde os arredores geralmente são facilmente visíveis, algumas restrições ainda são necessárias dentro de fábricas e armazéns por razões de segurança. Para proteger melhor o pessoal dessa preocupação, um sensor de radar alinhado verticalmente, que detecta o “primeiro objeto” como o teto do corredor ou as vigas metálicas transversais abaixo dele, pode determinar imediatamente quando a empilhadeira atingiu uma área interna. Nesse momento, a velocidade máxima possível é automaticamente limitada a um nível tolerável e liberada somente ao sair do pavilhão. Para evitar uma limitação indesejada de velocidade sob vigas transversais ou pontes em campo aberto, que o sensor também registrará como o “primeiro objeto”, podem ser aplicadas configurações de alta intensidade de filtro e baixa taxa de amostragem.
Modo de medição “melhor reflexão”

Ilustração: dois alvos potenciais estão na faixa de detecção do sensor de radar. Embora a placa de plástico esteja mais próxima do sensor, este ainda detecta a placa de metal no fundo como o alvo principal.
Explicação: Devido ao seu comprimento de onda pequeno (2,45 mm a 122 GHz), as micro-ondas emitidas pelo sensor radar se comportam de forma semelhante à luz, o que significa que ocorrem efeitos como difração, reflexão total, desvio, interferência, entre outros. No exemplo mostrado, as ondas eletromagnéticas penetram principalmente a chapa de plástico e são apenas parcialmente refletidas, enquanto são completamente refletidas pela chapa metálica. A intensidade da amplitude da reflexão radar da chapa metálica é, portanto, significativamente maior do que a reflexão gerada pela chapa plástica altamente permeável.

Exemplo de aplicação: o modo “melhor reflexão” tem vários usos. Por exemplo, ao instalar refletores de canto de metal, a capacidade de detecção de objetos que de outra forma seriam fracamente refletivos pode ser bastante aumentada. Um exemplo disto é o controle preciso dos estabilizadores de guindastes móveis. O feixe de radar de um sensor de radar montado dentro da viga telescópica é direcionado a um refletor de canto posicionado na ponta. Se a viga transversal telescópica se mover para frente ou para trás quando o estabilizador for estendido ou retraído, o sensor mede essa mudança na distância e transmite os valores ao sistema de controle do guindaste como base para processos de ajuste posteriores. Depósitos de sujeira e resíduos de óleos hidráulicos, que dificultam a medição, podem ser ocultados de forma confiável no modo de medição de “melhor reflexão”, com orientação em direção ao refletor de canto.
Outro exemplo de aplicação para este modo de operação é a medição do nível de enchimento em recipientes fechados, sem a necessidade de perfuração ou corte na camada externa. Os pré-requisitos básicos são que o meio a ser medido tenha alta refletividade e as propriedades do material do tanque, ou do ponto através do qual o sensor mede, permitam a transmissão eficaz da onda de radar.
Modo de medição “objeto mais rápido”

Ilustração: dois alvos potenciais se movem em velocidades diferentes para perto ou para longe do sensor. O sensor de radar detecta a velocidade radial de ambos os alvos e reconhece o objeto mais rápido como o alvo principal.
Explicação: devido ao processo de modulação FMCW usado pelos sensores de radar da Pepperl+Fuchs, a velocidade relativa de um objeto detectado também está disponível como dados de processo por meio de uma medição da mudança de Doppler em cada ciclo de medição. O termo “velocidade relativa” refere-se ao fato de que essas medições não detectam a velocidade real de um objeto. Em vez disso, a velocidade radial, ou seja, a parte do movimento que age em direção a ou afastando-se do sensor, é medida. No entanto, o método não detecta velocidades tangenciais ou componentes de velocidade.

Exemplo de aplicação: o modo de medição “objeto mais rápido” é ideal para implementar proteção avançada contra colisões para AGVs. Se vários objetos estiverem se movendo em direção ao veículo na periferia de um AGV, por exemplo, o maior risco de colisão não surge necessariamente dos objetos mais próximos do veículo, mas do objeto que se move em direção ao AGV na velocidade mais rápida. No modo de medição “objeto mais rápido”, o sensor de radar detecta a velocidade e a distância desse objeto, o que pode ser usado para calcular quando uma colisão ocorrerá teoricamente e se uma viagem mais lenta deve ser iniciada dependendo das taxas de velocidade atuais.
Além disso, este modo de medição oferece a capacidade de realizar medições de velocidade confiáveis, mesmo que objetos estáticos altamente refletivos e, portanto, potencialmente interferentes, estejam na faixa de detecção. Esses objetos podem ser facilmente ocultados durante o processo de medição no modo “objeto mais rápido”.
Sensores de radar: desafiando os elementos
O vídeo a seguir fornece um breve resumo dos três modos de medição diferentes de sensores de radar.
Mais informações
Assine nossa newsletter e receba regularmente notícias e fatos interessantes do mundo da automação.